Seventh weeks - 08/12- 08/16/2019
This week we had a meeting on monday and we discussed about the work of the new students and their program. In this topic, the monday meeting have been moved to wednesday, according to the first day of SJSU students.
Overall the two main topics this week are the RFI questions and Jacques-Hariel's design on small scale podcar integrating sensors.
Jacques-Hariel and David (Mapapa) work on the small scale approched by Bill James on design and control system. Currently the principal sensors and actuators we are working to integrate are :
-Pixycam : Recognize shapes and colors
-Ultrasonic : This one has already been used on the 1/12th scale podcar to detect any other podcars on the track.
-Accelerometer : Fixed inside the podcar, it measure the acceleration in 3 principal axis and then allow to determine the position of the podcar in space.
-Tof (Time of Flight) : Also used to detect obstacles
-Servo : Used to rotate the Pixycam. The podcar will be able to "look around" a corner to check if there is another podcar at the end of it. It will also be able to follow a target which can be usefull to recognize a corner or a swicth area.
-Motor : Use to operate the driving wheels.
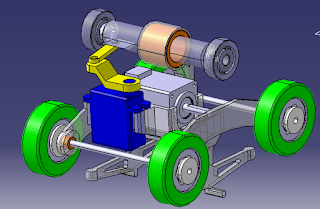
There is the design Jacques-Hariel has been working on :
There is the design Jacques-Hariel has been working on :
 |
| Front view
On this view we can see the ultrasonic at the bettom, the Pixycam in the middle and the ToF at the top. There is enough space inside for the arduino card and batteries.
|
 |
| Back view |
On this back view, we can see an other ultranonic at the top, a Neopixel (Led) and an other ToF. All of them are positioned to avoid any inteference in their signals. The Neopixel serves as an indicator for the Pixycam (of the podcar in behind this one).
 |
| Inside view |
On this last view, we can see the Pixycam operated by the servo.
Now we have to work on the control system to get all sensors and actuators communicating together.

Commentaires
Enregistrer un commentaire