First Week -- 7/1/2019 - 7/5/2019: Getting started
July, 5th 2019
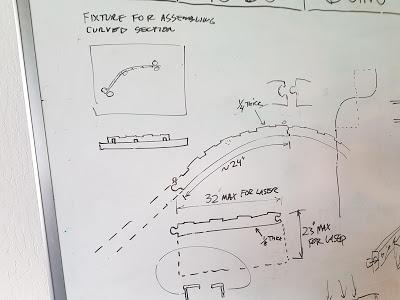
We began this week by getting to know each other and getting introduced to the small scale superway project. To begin, we (David, Jacques and Ethan) met with Prof. Furman, Mr. Swenson, and Mr. Hagstrom (who called in remotely). We talked about the project, and we brainstormed some ideas for the guideway’s construction, as we can see in the picture below.
In addition, David gave us (Ethan and Jacques) an overview of how the control system works and the existing issues (motor, wheels, etc).
On the track we have two principal problems: The curved parts and the switch area. Regarding the curve, Prof. Furman proposed to divide the curved part into several little parts that we can make by water jet and then assembly them. Perhaps make it out of two parts in an L shape with box joint style joinery between.
We also discussed the possibility of using different materials (wood, Mdf, or metal) for the track and how we might assemble the parts.
Later that day, we looked at the old 1/12 scale system and considered making a single bogie instead of a master slave system (because the existing is not optimized for the 1/12 scale podcart). We also considered using different wheels.
At this point, we currently have two ideas about the bogie: Ethan's design, using two main drive wheels and some little wheels/3d printed nubs to lead and stabilize the podcart and Jacques-Hariel's design using four driving wheels and two little wheels to lead the podcart.
Ethan’s design:
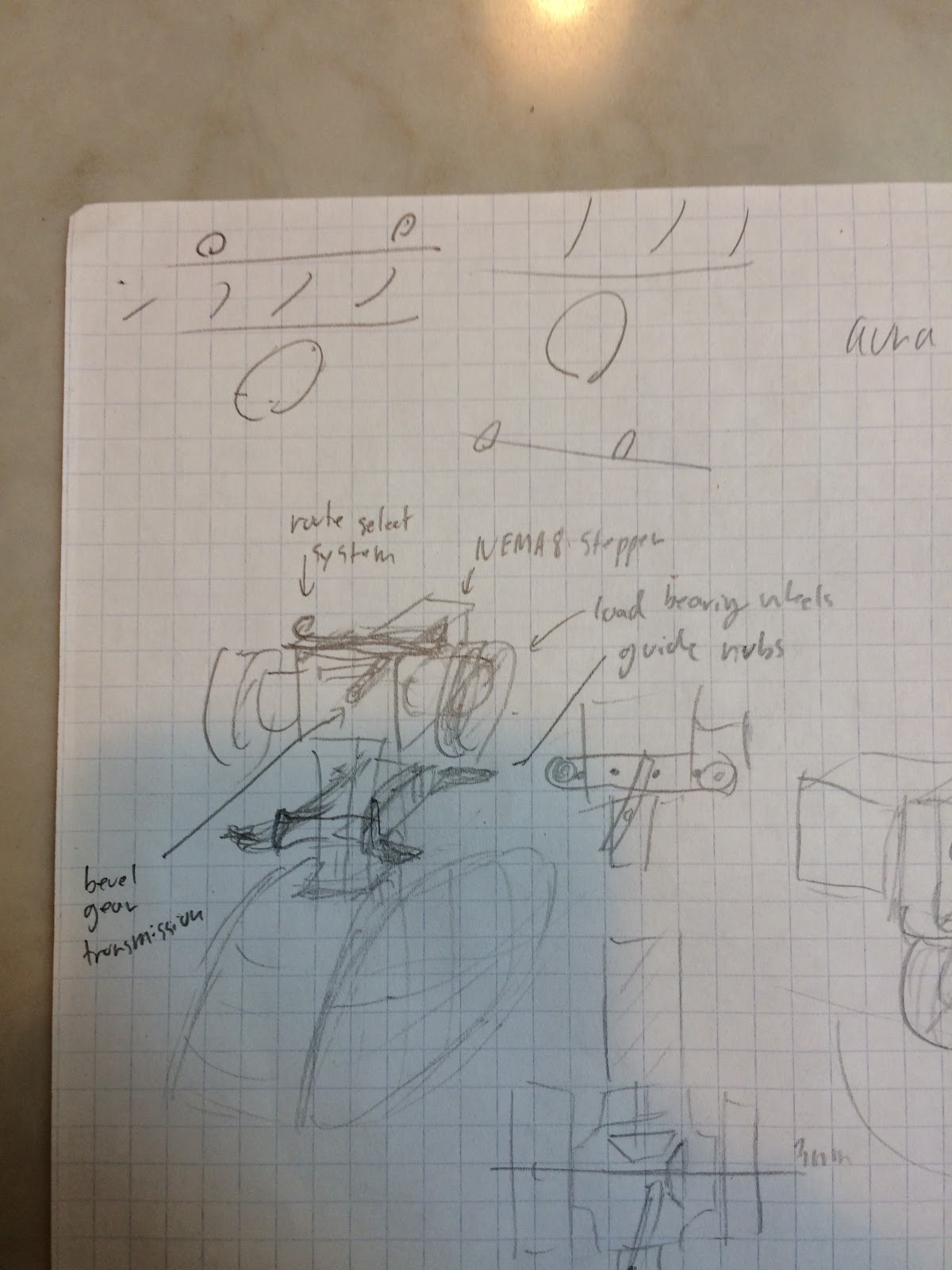
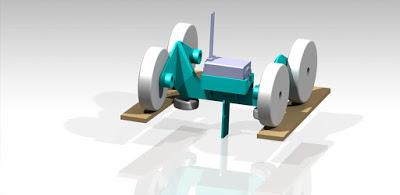
Ethan originally designed and cadded this as a full scale system. As such, the current (and only) cad model of the design is for a full scale bogie. For the 12th scale design, the route select system and load bearing wheels remain the same, but the guide wheels/nubs are moved below the rail bearing surface on the 12th scale as opposed to above the rail bearing surface on the full scale.
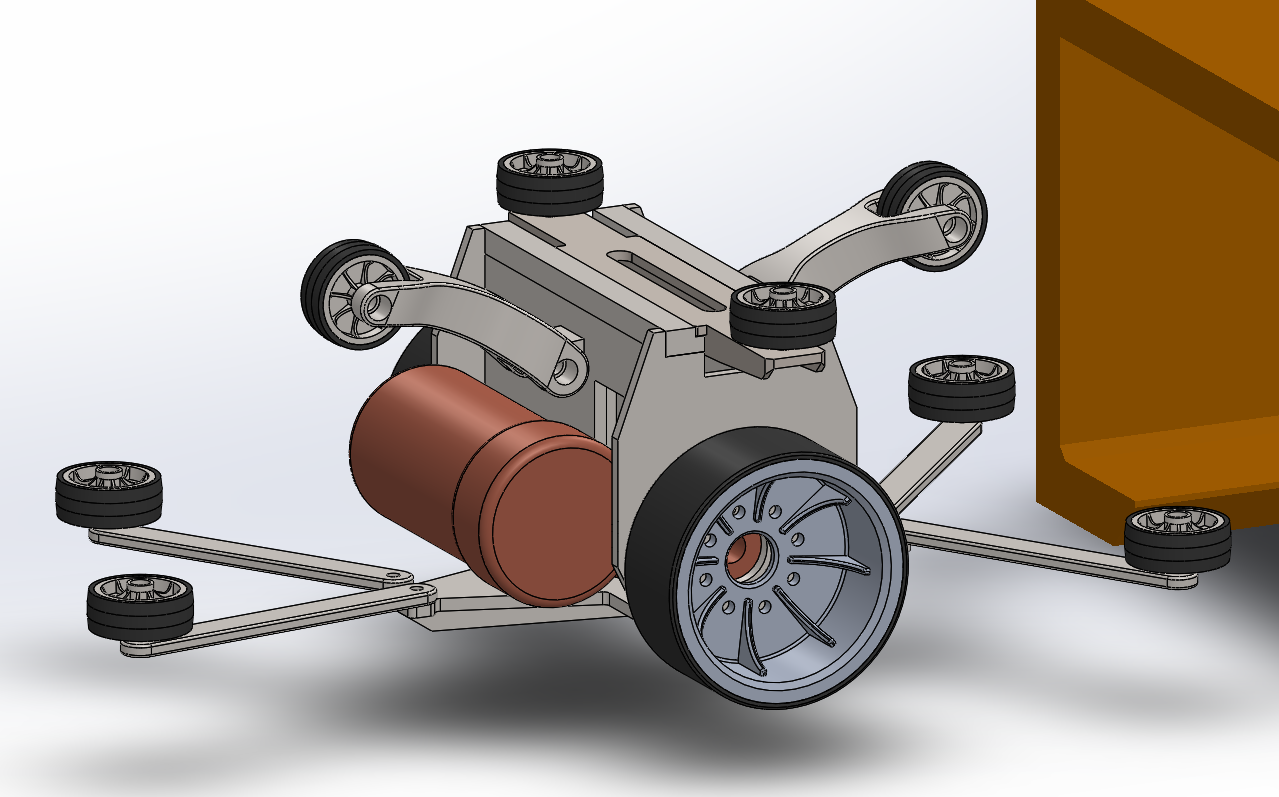
Full scale Cad: The skinny beams holding the guide wheels are just to show the concept (and because Ethan got tired of cadding). They would be much more robustly designed in a finalized cad.
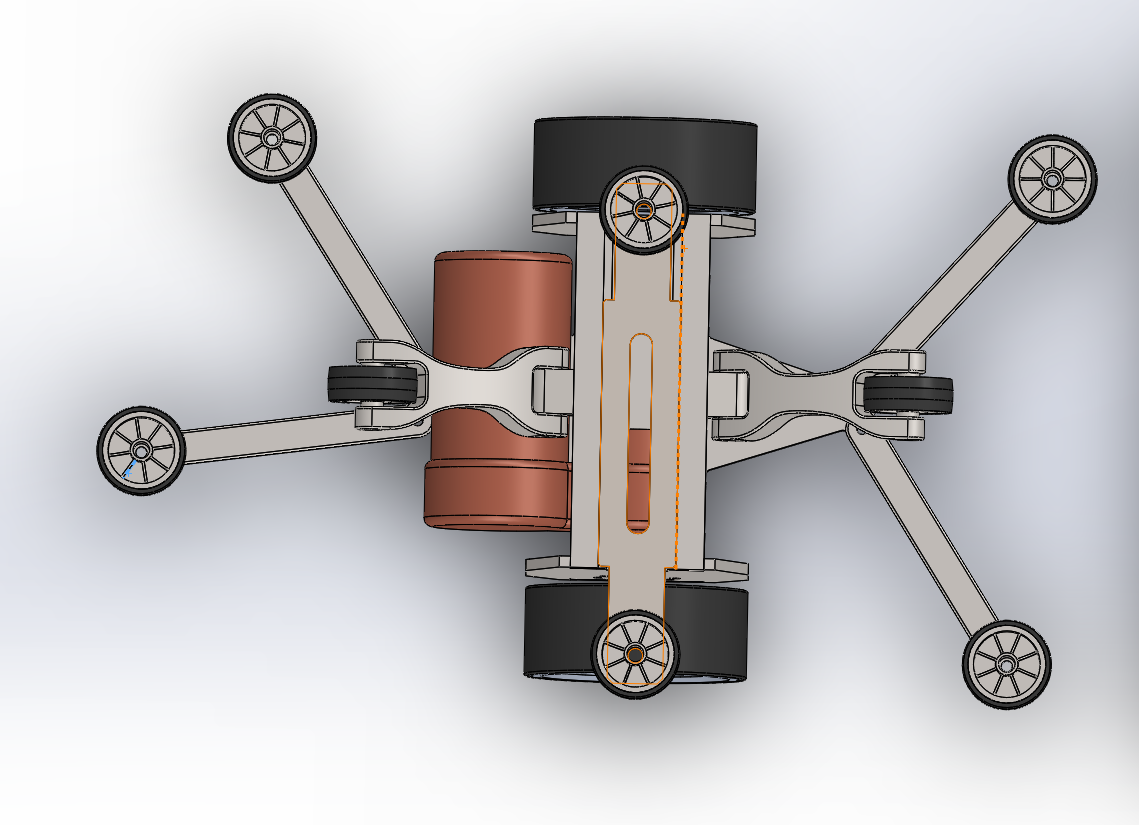
The wheels on top are mounted to a slider that allows for route selection (described later)
Sketch of adaptation for 12th scale:
Jacques’ Design:
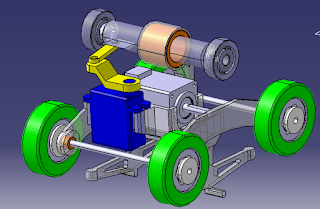
Currently, Jacque’s design employs four wheel drive via a gear train (not shown) from a central motor. The motor orientation/location may change depending on what motor we settle on for a bogie. There are a pair of guide rollers located under the main chassis.
We also looked at the old track, we consider looking at Ethan's design to avoid using blue bracket construction method. His design use "joint spline" system (with the waterjet taper joining style).
Sample track section: (Curves have not been cadded yet, but a composite acrylic - aluminum curve is being pondered)


Joint spline region: Joint is designed to take advantage of the waterjet’s inherent tapered cut. The spline that crosses the joint is designed to be waterjetted from ¼” stock with a slight taper on the mating surfaces

Alternative to blue bracket construction: Again, the waterjet taper is used to secure the parts together. A dab of loctite or superglue can be added as well.

Not entirely relevant now, but here is a track stand designed to be entirely cut on the laser or waterjet. If waterjet is used, the taper joining method can again be used.
Regarding Jacques-Hariel bogie design, we consider looking at horizontal guideway sections, rather than the vertical ones that we’ve been using since the beginning. In this way, we could be able to waterjet the curved section in one part, using a metal sheet.
We also thought about the contact between wheels and guideway, which needs to improve to get a better efficiency of the motor.
Ethan put cad files of the track on the drive and export as STL so I (Jacques-H) can open them using CATIA (waiting on SolidWorks).
We (Ethan and Jacques) met on Wednesday, and brainstormed about the switch. We currently have two ideas:
-Two wheels on the top that move back and forth, interface with two guiding rails.
-Single wheel on top that moves back and forth and interfaces with one guiding rail to support the podcar above the gap.
We did FEA on Ethan's support pillar using critical weight of 10 kg to check the thickness of the aluminium part (making by waterjet). The support is strong enough, we've got a maximum displacement of 2mm on edge of the support pillar, which means 0.25% deflection with respect to the total length.
We also thought about waterjeting entire curve or waterjet part of curve and use acrylic bent around the waterjet portion. We also are keeping in mind the idea of using carbon fiber or fiberglass for the curve, which is really expensive solution but also really lightweight and rigid.
Finally, for the next Monday, I (Jacques-H) will finish the gantt sheet and upload it to google drive. Ethan made a copy of the report template.
> We currently have no questions regarding our project. This may change in the future.
> Ethan researched various ATN rail and switch systems a little while ago. The link to the document is here: https://docs.google.com/document/d/1nc-QgBloxL9Q-w1Ca8f9FXIhSdMabn-JotnEkot_-84/edit?usp=sharing
> The main conclusions from this are:
>> Passive switches are very uncommon
>> Rubber wheels are predominantly used to improve rider comfort
>> Motors are almost always mounted perpendicular to the wheels and presumably use a worm drive for power transmission
>> Full scale rails are predominantly of downwards facing C construction; all guide wheels are kept within the rails [_] ← Like this but upside down
>> A rickshaw motor and transmission may be viable for a full scale superway
> I (Ethan) have not discussed these findings thoroughly with the rest of our team. We will most likely discuss more next week.
> From our observation of the current 12th scale track, we have noticed the following issues:
>> Bogie stalls
>> Bogie falls into gap created by switch
>> Green wheels wear substantially while conical wheels appear to not provide substantial traction
>> Discontinuities in the track hinder bogie movement
> We have also been informed that…
>> 3D printing the blue brackets is highly time consuming
>> bevel/miter gears have been problematic for small scale team

Commentaires
Enregistrer un commentaire