Second Week | 7/8/2019 - 7/12/2019: More Designs
Monday was a long day. But a fun and interesting day no less! We began our day by meeting
with Ron and Eric (the latter calling in from skype), we discussed about Ethan and
Jacques-Hariel designs introduced in the last blog article. We spent a big part of the morning
discussing about these designs and how to improve them.
The conclusion was to finish the designs in order to be able to analyze the advantages and
disadvantages of each one and then choose the final solution.
By the afternoon, we worked on the gantt and finally created the template.
We got some difficulties to translate the template because Jacques-Hariel started it on is
french version of Excel. We structured the project but now we must plan each task
(give deadlines) in order to optimize the time of the project and being sure to achieve each
objective. This part of the work will be done by Tuesday the 16th.
The main lines of the gantt are : Bogie Design; Guideway Design; Switch Design;
Whole System Assembly and finally Manufacturing of the final solution. Of course each
line is detailed in several progressive tasks.
By the end of the afternoon, we met the alumni and had a good exchange with them.
We started, Ethan and Jacques-Hariel by presenting our designs and received constructive
criticism from them, which is really helpful. After that, they introduced us to their
different projects and the work done (Full scale, Half scale). The Half scale team gave us
a demonstration of their bogie system and explained the electronics.
The evening we had a meeting about business with Ron and some collaborators from
Colorado. Once again Ethan and Jacques-Hariel presented their design. We discussed
about human aspect, perspectives in Africa in particular in Rwanda.
The next few days (Tuesday, Wednesday, and Thursday) were spent by Jacques-Hariel and
Ethan independently designing and researching various elements of their respective designs.
Jacque-Hariel worked on a new design for the guideway explorating a new way to switch,
using two floors with horizontal rail section. The idea is to separate the turning and the
switching actions.On the current system, we attempted those actions at the same time,
which was difficult and creates a big gap in the track. To avoid that, we can use two “floors.”
First, the podcar choose if it stay upstairs or if it goes downstairs (this is the switch), then,
the podcar take the curved rail to turn.
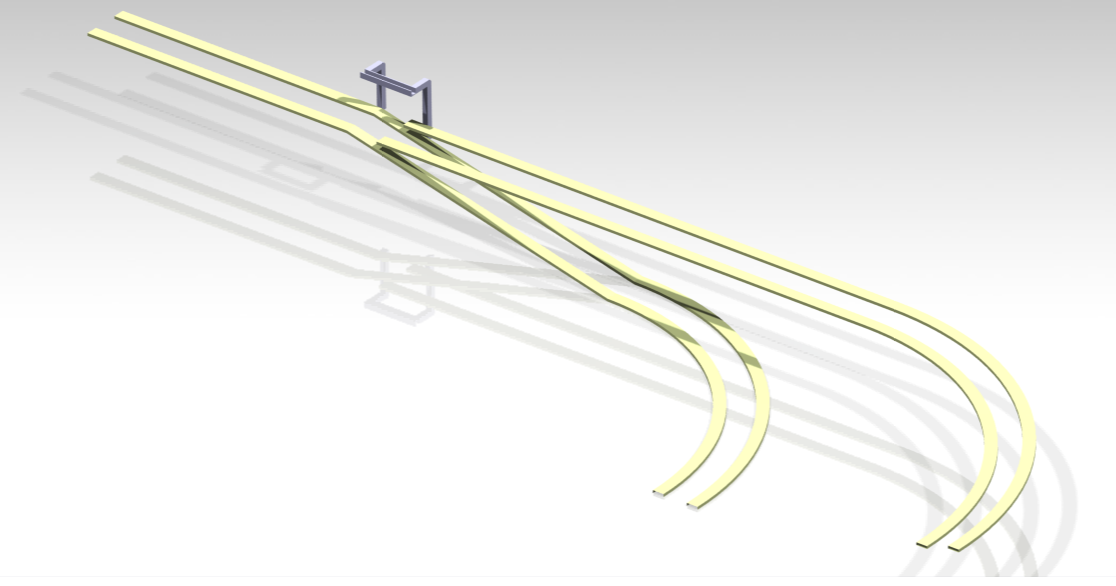
Jacques-Hariel’s 2 floors guideway design
On the bogie, we use two wheels above to ride on a kind of bridge if the podcar stay upstairs.
Based on the alignment of the wheels, the bogie either stays on the upper track, or
drops down to the lower track.
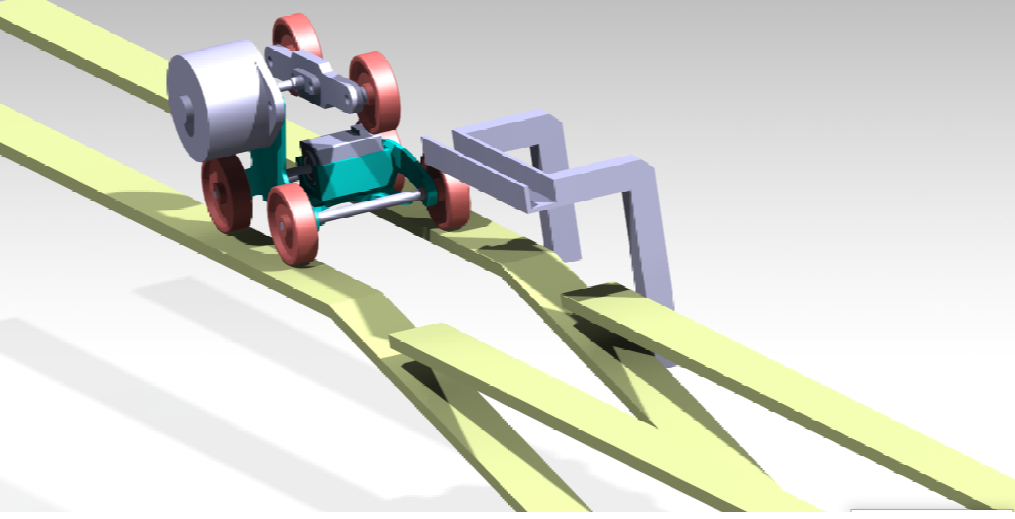
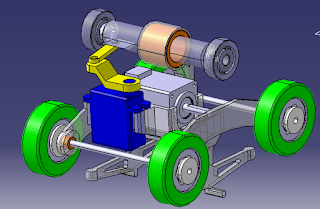
Jacques-Hariel’s Bogie design
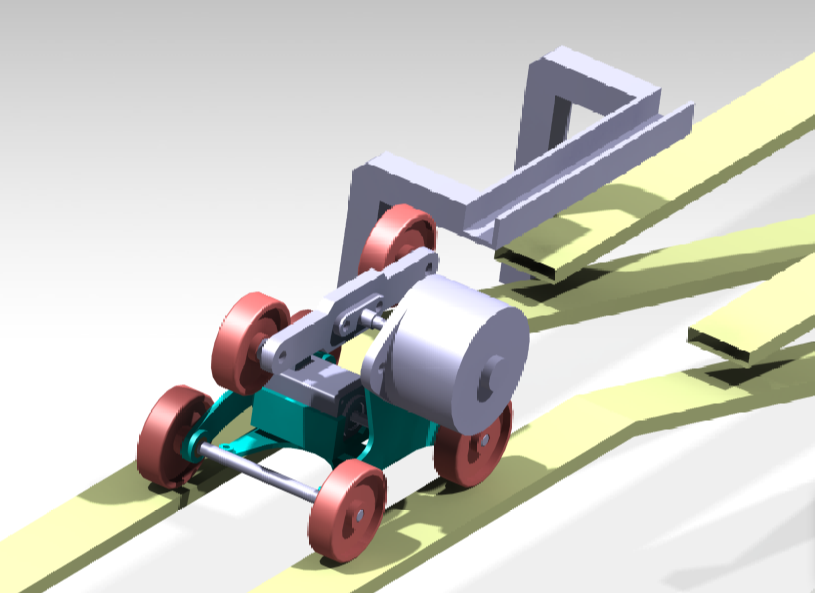
Jacques-Hariel’s Bogie design
The two wheels are actuated by a linear motor.
The podcar doesn’t appear on those pictures but it will be just under the bogie.
---
Ethan focused on adapting the route select system he demonstrated on Monday from full
scale to our 1/12th scale model. This adaptation centered around the selection of an
actuation device to actually move the route select.
Ethan’s original plan for actuation involved either a rack and pinion system or a lever
system, both based on a small rc servo motor. At the meeting on Monday, however,
it was mentioned that since the mechanism really only has two default states
(left or right), an actuator with only two default states is all that is needed.
Thus, a solenoid actuator was suggested. It was also suggested that biasing the system
towards one side (default right or default left) would be a necessary safety feature of
the system, something that is very easily accomplished with a solenoid, and slightly
less easily accomplished with a servo.
To determine whether a servo or solenoid was the way to go, Ethan made this small
chart:
After further research, it became apparent that a solenoid with the required travel would be
too large and draw too much current to be a viable solution for out bogie. Thus, Ethan
decided to go with a rc servo for this application.
The servos he chose were:
Or
For now, he is going with the first link (Power HD Micro Servo HD-1600A) because it has a
model.
After selecting the motor, it was a matter of cadding the motor, motor mount, route select slot,
and route select slider.
Ultimately, the whole assembly looks like this:

The drive motor is on the left, while the servo is on the right. The slider is towards the top.
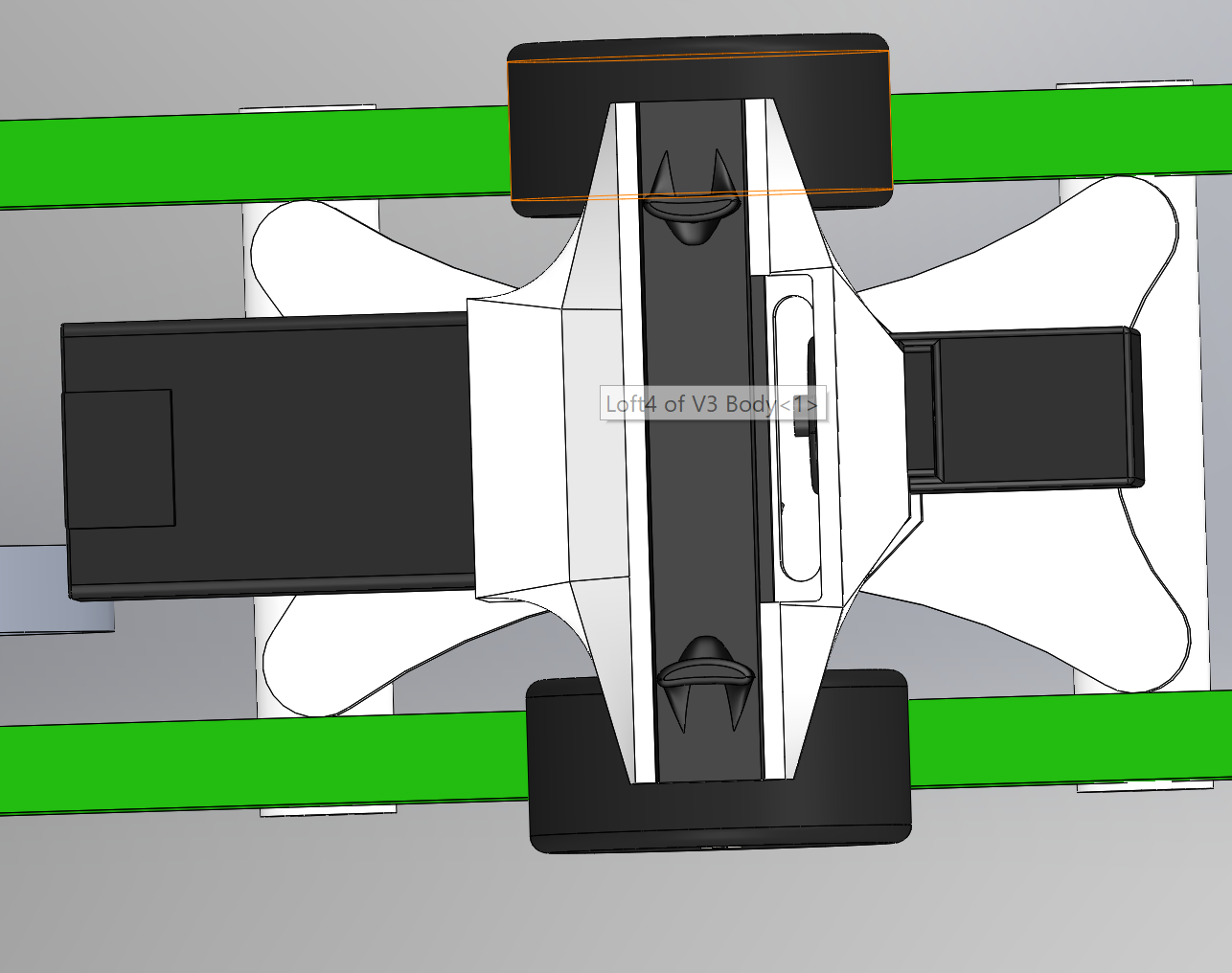
We can see the top of the slider (Oops the splines are broken again on the route select nubs)
and the slot that the servo arm goes through to interface with the slider. The pegs that
connect the slider to the servo arm are not shown.
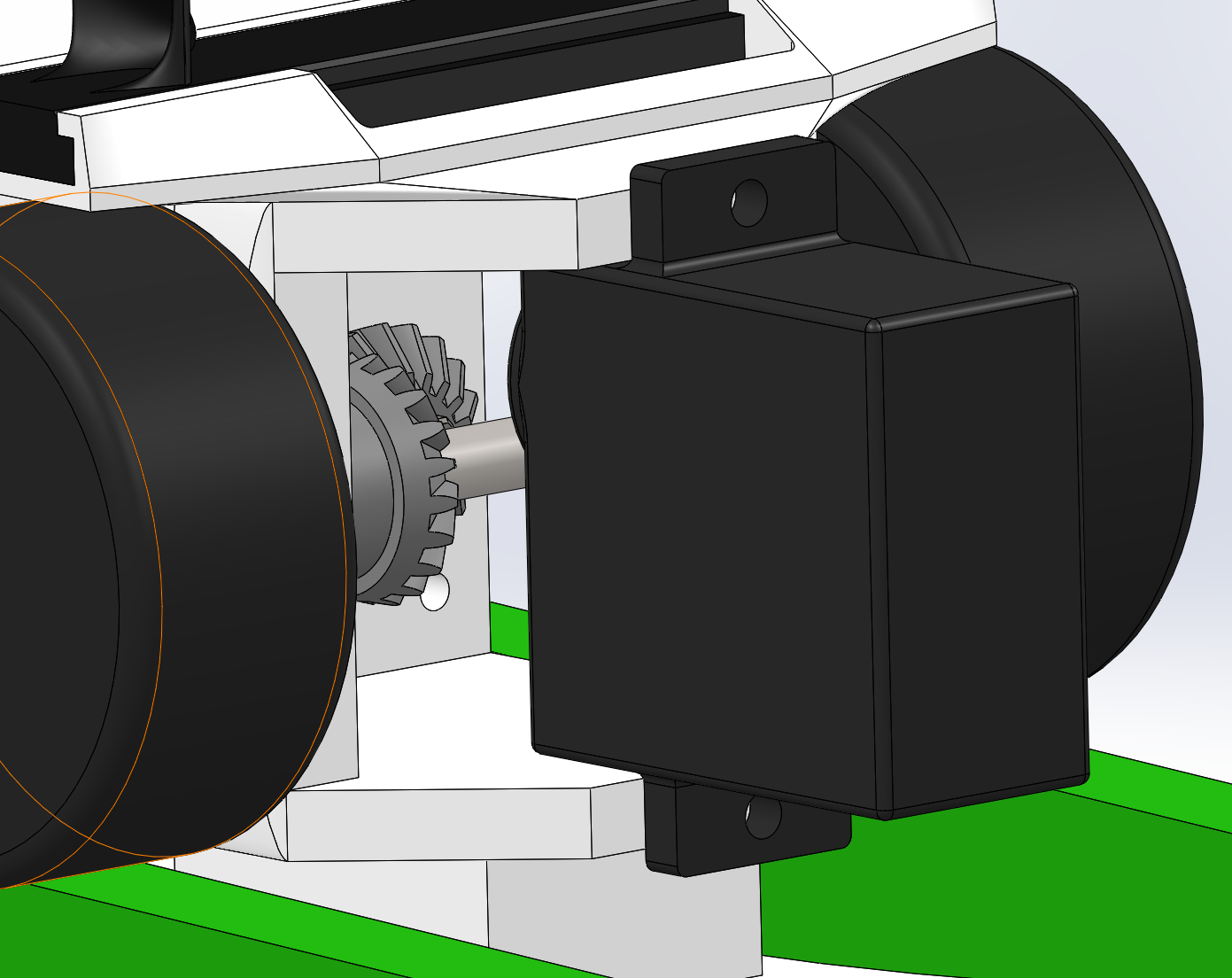
The servo is a pretty snug fit, but has no interference as far as we can tell.

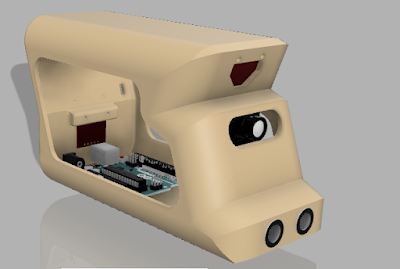
This is what it would look like with the current cabin “attached.”
The actual actuation of the slider is done by using an arm connected to the servo that
interfaces with two “pegs” mounted to the side/top of the slider. These pegs are pushed by
the servo arm one way or another to move the slider. At the end of the stroke, the pegs rest
against the bogie frame, taking the force from turning off of the motor.
Ethan has some rough sketches of how to make a curved section or the track or how to
actually make the switch, but no cad of those portions.
Unfortunately, we did not come up with five designs before moving forward to cad. Although,
if we do count the previous iterations of the track and bogie (which we discussed amongst
each other), we do arrive with a total of at least five designs.
On Friday, Jacques-Hariel and Ethan met for a few hours to discuss what we had done
throughout the week and work collaboratively on aspects of the project that we could not
work on remotely.
Jacques-Hariel began by presenting his idea for the two floor switch system and discussing
how bidirectional travel through a switch is not required for our 1/12th scale track. We then
transitioned to a discussion of Ethan’s route select system and the possible methods of
actuation for Jacques-Hariel’s design. Unlike with Ethan’s design, some sort of linear
actuator is favorable for Jacques-Hariel’s design. Jacques-Hariel currently has a very large
linear actuator perched atop his bogie to accomplish the route selection, but together, Ethan
and Jacques-Hariel were able to find a smaller actuator with a similar travel, unfortunately
at a higher cost.
At this meeting, Jacques-Hariel and Ethan also worked on the Gantt Chart and chatted with
an industrial design major (Jessup) who might be interested in helping the superawy project
(if we are interested in him as well).
Jacques-Hariel and Ethan also toyed with the idea of having a single railed bogie system for
its ease of construction, but quickly realized that the switch for such a system would be more
complex than the current system.
And that just about concludes our work from this week. We have two fairly solid track and
bogie designs which are (to a degree) compatible with each other. In addition, we have
researched possible actuators for the track select systems. After our meeting on Monday,
we hope to arrive at one final design which we can prototype on the laser cutter or 3D printers.

Commentaires
Enregistrer un commentaire